
Rapports sur les projets spéciaux sur les entreprises
Estimation du débit de circulation à partir des images de caméras de circulation : vers des flux de données sur la circulation en temps réel
Passer au texte
Début du texte
Remerciements
Les auteurs du présent article tiennent à remercier Rastin Rassoli pour son aide avec certaines parties de ce travail, et Alessandro Alasia pour ses précieux commentaires. Les auteurs aimeraient également remercier le Conseil de recherche et développement de Statistique Canada qui a financé ce projet.
Information pour l’usager
Signes conventionnels
Les signes conventionnels suivants sont employés dans l’article :
- Nd,c
- Comptes quotidiens de véhicules pour une section de route
- Nt
- Nombre d’instances différentes de véhicules dans l’image
- Nc
- Compte quotidien moyen de véhicules
- Nd,est
- Débit de circulation estimé
- NDJMA
- Débit journalier moyen annuel (DJMA) historique
- Tpass,i
- Temps pris par différents véhicules pour traverser le champ de vision de la caméra
- Dp
- Débit de circulation sur une période P
- NP,moyen
- Nombre moyen de véhicules par image
- DTi
- Débit de circulation réel sur le terrain (réalité de terrain) sur une période d’échantillonnage Ti
- DT
- Circulation estimée sur une période T
Résumé
L’estimation du début de circulation dans les grands centres urbains demeure un défi pour des raisons d’ordre à la fois pratique et technique. Dans le présent article, nous proposons un système de vision par ordinateur qui permet d’extraire de façon périodique des comptes de véhicules des images des caméras de circulation au Canada. Nous avons commencé par passer en revue les programmes de caméras de circulation existants au Canada. Par la suite, nous avons mis au point un prototype de système pour recueillir des images de trois secteurs de compétence dotés de caméras de circulation au moyen d’interfaces de programmation d’applications (API). Le système a permis de détecter différentes classes de véhicules à partir de ces images. La capacité de détection d’objets du système est fondée sur le modèle de détection d’objets de source ouverte You Only Look Once, version 3 (YOLOv3), qui a été entraîné au moyen de l’ensemble de données Common Objects in Context (COCO). Le système de traitement extrait des images statiques à des intervalles de haute fréquence à partir des API des caméras de circulation et génère des comptes en temps réel des véhicules détectés (voitures, autobus, motocyclettes, etc.). Enfin, nous avons mis en œuvre et évalué différentes méthodes pour estimer les débits de circulation à partir de ces comptes et, après avoir analysé les données de sortie, nous avons constaté qu’il est possible d’en tirer des tendances claires de la circulation, de sorte qu’il serait avantageux d’élargir le système pour en faire un programme statistique de données sur la mobilité en temps réel à grande échelle.
1 Introduction
La quantité de véhicules personnels, commerciaux et de transport en commun dans les grandes régions urbaines génèrent des débits élevés de circulation qui entraînent souvent des congestions routières. Ces congestions sont associées à un certain nombre de défis politiques, y compris la nécessité d’investir dans l’infrastructure, le coût économique du temps de déplacement, la notion d’une ville où il fait bon vivre et les préoccupations au sujet des émissions de gaz à effet de serre. Selon le Texas A&M Transportation Institute, les heures de déplacement supplémentaires et les achats de carburant associés aux congestions routières se sont traduits par des coûts de 166 milliards de dollars pour les Américains en 2017 (Schrank, Eisele, & Lomax, 2019). Bien qu’une analyse efficace de la circulation (y compris les politiques de transport optimales) soit désormais indispensable dans les régions urbaines, l’estimation du débit de circulation n’en demeure pas moins un défi pour les autorités municipales et provinciales. De plus, les statistiques sur le flux de mobilitéNote en temps réel ont une pertinence intrinsèque pour les programmes statistiques et peuvent être utilisées comme données d’entrée dans la modélisation et l’analyse locales et macroéconomiques. Les estimations de la circulation routière peuvent fournir des indicateurs importants des activités économiques locales, en plus de pouvoir servir de complément aux sources de données existantes sur la mobilité pour les programmes de tourisme et de transport.
Pour arriver à estimer et à analyser la circulation, il faut d’abord recueillir les données pertinentes. Cela dit, les approches traditionnelles d’estimation et de collecte de données manuelles ou à l’aide de capteurs sont inefficaces ou impossibles à appliquer à des débits croissants. La rapidité de la compilation et l’ampleur des activités de collecte des données nécessaires posent aussi problème. Pour pallier ces problèmes, nous pouvons faire appel à la vision par ordinateur afin de créer des systèmes automatisés de collecte de données de circulation. Cette technologie permet de surveiller et de prévoir efficacement la circulation et d’orienter tant les politiques en matière de circulation que les politiques économiques plus générales. Les techniques de vision par ordinateur ont ouvert la voie à l’extraction automatique d’information à partir de différents types d’images et pour différents emplois. De nombreux algorithmes de vision par ordinateur ont ainsi été créés à des fins de détection et de suivi des véhicules à partir d’images et de vidéos, comme le modèle de détection d’objets You Only Look Once, version 3 (YOLOv3) (Redmon & Farhadi, 2018) (Redmon, 2018). Ces algorithmes peuvent être utilisés pour construire des systèmes intégrés d’estimation du débit de circulation.
Dans le présent document, nous proposons un système de vision par ordinateur conçu pour estimer le débit de circulation à partir des images de caméras de circulation au Canada. Nous avons commencé par passer en revue les programmes de caméras de circulation existants au Canada, ce qui nous a permis de trouver des programmes dans 10 villes canadiennes, regroupant au total 1 518 caméras. Notamment, toutes les provinces canadiennes ont des programmes de caméras de circulation routière, qui totalisent 2 881 caméras. Les images de caméras de circulation de bon nombre de ces programmes sont accessibles au public par l’intermédiaire d’interfaces de programmation d’applications (API). Le système proposé utilise des images provenant des API de trois programmes de caméras de circulation, gérés respectivement par les Villes de Calgary et de Toronto et par la Province d’Ontario. Le système mis au point utilise le modèle de détection d’objets de source ouverte You Only Look Once, version 3 (YOLOv3), qui a été entraîné sur l’ensemble de données Common Objects in Context (COCO), pour détecter différents types de véhicules dans les images (Lin, et al., 2014). Des comptes des types de véhicules détectés (voitures, autobus, motocyclettes, etc.) ont ainsi pu être générés. Nous avons ensuite exporté les résultats sous forme de série chronologique et analysé les données de sortie. La visualisation et l’analyse des ensembles de données recueillis ont révélé qu’il est possible d’en tirer des tendances et des schémas clairs de la circulation. Nous proposons aussi dans cet article différentes méthodes pour estimer les débits de circulation à partir des comptes tirés des images statiques, méthodes que nous avons mises à l’essai au moyen des données recueillies pour estimer les débits de circulation de plusieurs sections de route.
Le présent article est structuré comme suit : la section 2 présente un aperçu du contexte. La méthodologie et le flux de travail élaborés pour extraire le nombre de véhicules des images de caméras de circulation sont ensuite présentés dans la section 3. La section 4 traite des méthodes proposées pour estimer le débit de circulation à partir des données obtenues de caméras de circulation. Enfin, les résultats sont présentés dans la section 5, et les conclusions et travaux à venir, dans la section 6.
2 Contexte et travaux sur le sujet
2.1 Collecte de données sur la circulation
Les données sur la circulation en temps réel sont essentielles et utilisées dans nombre d’applications qui soutiennent les politiques urbaines et régionales. Cette nécessité a amené les chercheurs à élaborer des méthodes d’acquisition de données sur la circulation en temps réel, en tirant notamment parti des données des sondes et du système mondial de localisation (GPS) (Sekułaa, Markovića, Laana, & Sadabadia, 2018) (Snowdon, Gkountouna, Zü e, & Pfoser, 2018).
Dans une étude sur les capteurs de données sur la circulation (Snowdon, Gkountouna, Zü e, & Pfoser, 2018), les auteurs ont combiné les données des capteurs stationnaires et des véhicules-sondes pour obtenir des estimations des flux de circulation totaux. Les données des véhicules-sondes sont générées par un véhicule individuel, généralement au moyen d’une application pour téléphone intelligent, et portent notamment sur la vitesse, la direction et l’emplacement d’autres véhicules (Snowdon, Gkountouna, Zü e, & Pfoser, 2018). Dans une autre étude (Sekułaa, Markovića, Laana, & Sadabadia, 2018), les données des véhicules-sondes ont été combinées à celles d’enregistreurs automatiques de la circulation pour alimenter un réseau neuronal. L’objectif de cette étude était d’estimer le débit de circulation historique dans des régions où les capteurs de données sur la circulation sont éloignés les uns des autres (Sekułaa, Markovića, Laana, & Sadabadia, 2018).
D’autres chercheurs ont étudié la fiabilité de la technologie de repérage par GPS afin de déterminer s’il était possible de l’utiliser pour générer des données sur la circulation (Zhao, Carling, & Håkansson, 2014). Ils ont constaté que, même si les données sur l’emplacement géographique étaient exactes, la vitesse était sous-estimée et les données sur l’altitude n’étaient pas fiables (Zhao, Carling, & Håkansson, 2014). Les lacunes dans la collecte de données au moyen de la technologie GPS et de capteurs ont amené les chercheurs à étudier d’autres façons d’imputer les données manquantes (Yang, et al., 2018). Certains ont découvert qu’une approche d’imputation fondée sur le krigeage est plus efficace pour imputer les données manquantes, comparativement à la méthode des k-plus proches voisins et à celle de la moyenne historique (Yang, et al., 2018).
Bien que ces approches soient efficaces pour recueillir des échantillons sur la circulation dans une zone donnée, elles ne permettent pas un dénombrement complet de tous les véhicules dans cette zone. En revanche, les techniques de vision par ordinateur sont de plus en plus utilisées pour élaborer des méthodes efficaces et automatiques de collecte de données qui fournissent d’autres sources de données. Ces techniques peuvent être appliquées à des images provenant de caméras de circulation pour fournir un dénombrement complet des véhicules à partir d’images et de vidéos. Parmi ces techniques, les modèles de détection et de suivi d’objets fondés sur la vision par ordinateur sont souvent utilisés pour recueillir des données sur la circulation. Dans le reste du présent article, nous abordons ces modèles et les travaux dans lesquels ils sont utilisés, de même que les lacunes dans la recherche que nous cherchons à combler grâce à ces modèles.
2.2 Modèles de détection d’objets fondés sur la vision par ordinateur
L’élaboration de modèles fondés sur la vision par ordinateur pour la détection et la classification des véhicules revêt un intérêt croissant. Pour entraîner ces modèles, différents ensembles de données ont été compilés et mis à la disposition du public, comme les ensembles de données COCO (Lin, et al., 2014) et Cityscapes (Cordts, et al., 2019).
Les modèles de détection d’objets fondés sur la vision par ordinateur sont de plus en plus fondés sur des réseaux neuronaux profonds. La popularité croissante des approches basées sur l’apprentissage profond est liée au fait qu’elles donnent généralement de meilleurs résultats pour la vision par ordinateur que les techniques traditionnelles où les caractéristiques sont conçues de façon explicite (Doulamis, Doulamis, & Protopapadakis, 2018). Une catégorie de réseaux neuronaux, les réseaux neuronaux convolutifs (RNC), est de plus en plus populaire dans le domaine de la vision par ordinateur et est utilisée pour accomplir diverses tâches telles que la détection et la classification des objets, la segmentation sémantique, le suivi des mouvements et la reconnaissance faciale. Cette popularité est attribuable à l’efficacité des RNC pour accomplir de telles tâches, car ils peuvent réduire le nombre de paramètres sans réduire la qualité des modèles obtenus (Doulamis, Doulamis, & Protopapadakis, 2018).
De nombreux modèles fondés sur les RNC ont été mis au point pour détecter et classer les véhicules. Parmi ces modèles, mentionnons la catégorie des « modèles de détection en une étape » (single-stage detectors), qui détectent des objets en un seul passage dans le réseau. Par conséquent, ces modèles sont généralement rapides, comme le modèle Single Shot Detector (SSD), dans lequel les tâches de localisation et de classification des objets sont effectuées en une seule propagation avant dans le réseau (Liu, et al., 2016), et le modèle YOLO, populaire en raison de sa vitesse et de sa précision. Ce dernier modèle, dont l’architecture est fondée sur le RNC, est utilisé pour détecter des objets en temps réel et, comme son nom l’indique, il ne nécessite qu’une seule propagation avant dans un réseau neuronal pour détecter des objets (Redmon, 2018). En raison de sa vitesse et de sa précision, nous utilisons le modèle YOLOv3 entraîné sur l’ensemble de données COCO (Redmon & Farhadi, 2018) pour détecter et classer différents types de véhicules. Une autre catégorie de modèles de détection d’objets est celle des modèles de détection en deux étapes, qui détectent d’abord les régions d’intérêt où un objet serait présent dans l’image (première étape), puis analysent ces régions plus en détail pour détecter les objets qui s’y trouvent et les classer (deuxième étape). Parmi ces modèles de détection en deux étapes figure l’algorithme Faster R-CNN, un algorithme fondé sur le RNC rapide et basé sur les régions. Dans ce modèle, un réseau neuronal entièrement convolutif propose d’abord des régions, puis un détecteur FAST R-CNN utilise les régions proposées pour exécuter la tâche de détection (Ren, He, Girshick, & Sun, 2016).
2.3 Collecte de données sur la circulation fondée sur la vision par ordinateur
La communauté de la recherche utilise de plus en plus les modèles de détection d’objets comme ceux qui précèdent pour détecter, classer et suivre les véhicules afin de générer des statistiques sur la circulation. Notamment, Fedorov, Nikolskaia, Ivanov, Shepelev, & Minbaleev (2019) ont élaboré un système pour estimer le flux de circulation à partir d’enregistrements vidéo de caméras de circulation, lequel compte et classe, selon leur direction, les véhicules détectés dans les enregistrements. Le système est fondé sur un modèle de détection en deux étapes Faster R-CNN et comprend un algorithme de suivi simple et en temps réel (Simple Online and Realtime Tracking) et un algorithme heuristique basé sur les régions, lequel classe les véhicules selon leur direction dans l’enregistrement. Les chercheurs ont entraîné et testé le système au moyen d’un ensemble de données de 982 images vidéo contenant plus de 60 000 objets tiré d’enregistrements vidéo pris à une intersection de Tcheliabinsk, en Russie. Les résultats révèlent que le système peut compter les véhicules et les classer selon leur direction avec une erreur absolue moyenne en pourcentage inférieure à 10 %.
Li, Chang, Liu, & Li (2020) proposent également un système pour compter les véhicules et estimer les paramètres des flux de circulation à partir d’images de sections de route où la circulation est dense. Le système utilise un réseau YOLO doté d’une architecture pyramidale pour détecter les véhicules, et une méthode de dénombrement fondée sur une région d’intérêt basée sur le suivi restreint de multiples véhicules, qui permet de dénombrer les véhicules qui traversent la région d’intérêt (représentée par une ligne) au cours d’une période donnée. De plus, la méthode proposée suit et analyse les trajectoires à court terme des véhicules qui circulent près de la région d’intérêt, ce qui améliore la précision du suivi et du dénombrement. Les chercheurs utilisent ensuite les comptes obtenus pour estimer les paramètres des flux de circulation tels que le débit, la vitesse et la densité.
Un autre article (Song, Liang, Li, Dai, & Yun, 2019) propose un système de détection et de dénombrement de véhicules fondé sur la vision, aux fins duquel les chercheurs ont préparé et publié un ensemble de données haute définition composé de 57 290 objets annotés dans 11 129 images. L’ensemble de données contient de petits objets annotés dans les images, ce qui améliore la précision des modèles de détection de véhicules entraînés sur l’ensemble de données. Dans le système proposé, la route sur l’image est extraite et divisée en deux sections au moyen d’une méthode de segmentation proposée de sorte à obtenir une région éloignée et une région rapprochée. Par la suite, le système utilise un réseau YOLOv3 entraîné sur l’ensemble de données préparé pour détecter le type et l’emplacement des véhicules dans l’image. Enfin, le système permet d’obtenir les trajectoires des véhicules au moyen de l’algorithme Oriented FAST et Rotated BRIEF.
D’autres chercheurs (Yadav, Sarkar, Salwala, & Curry, 2020) mettent l’accent sur la création d’indicateurs de la circulation destinés à la plateforme ouverte OpenStreetMap. Plutôt que d’utiliser des sources de données commerciales, le système proposé dans cet article exploite les images des caméras accessibles au public pour obtenir des renseignements sur la circulation. Il y détecte les véhicules à l’aide du modèle YOLOv3 pré-entraîné sur l’ensemble de données COCO (Yadav, Sarkar, Salwala, & Curry, 2020), et estime ensuite la circulation au moyen du traitement d’événements complexes (une méthode fondée sur l’apprentissage profond), de même que des propriétés telles que la vitesse, le nombre et la direction des véhicules au moyen de méthodes de détection des objets et d’extraction des propriétés des objets (Yadav, Sarkar, Salwala, & Curry, 2020).
Les auteurs d’un autre article (Liu, Weinert, & Amin, 2018) utilisent une approche fondée sur le traitement du langage naturel appelée Bag-of-Label-Words pour analyser les images à l’aide d’étiquettes de texte générées par le service de reconnaissance d’images de l’API Cloud Vision de Google. Ces étiquettes de texte sont notamment utilisées pour analyser les événements météorologiques et la circulation à partir des images des caméras de circulation sur les autoroutes (Liu, Weinert, & Amin, 2018). Les données sont représentées sous forme de matrice classique, ce qui permet l’interprétation sémantique et l’utilisation de techniques de compression et de décomposition des données (Liu, Weinert, & Amin, 2018).
Enfin, dans d’autres travaux (Chen, et al., 2021), les chercheurs ont utilisé un pipeline d’apprentissage profond doté d’une capacité de traitement évolutive pour recueillir des statistiques sur la mobilité des véhicules et des piétons. Ils ont ensuite procédé au nettoyage des données et à leur traitement en aval au moyen d’un masque statique basé sur la mesure de la similarité de structure (Structure Similarity Measure) afin d’en améliorer la fiabilité et la précision lors de la classification des piétons et des véhicules (Chen, et al., 2021). Ces travaux ont permis aux chercheurs de dégager des tendances quant au « débit de circulation » dans les régions urbaines, qui ont été utilisées comme indicateurs rapides expérimentaux de l’incidence de la COVID-19 sur l’économie et la société du Royaume-Uni (Chen, et al., 2021). L’architecture de la famille YOLO a été déployée sur la machine virtuelle Google Cloud à l’aide du matériel Nvidia GPU Tesla T4 (Chen, et al., 2021).
Les travaux de recherche ci-dessus présentent des systèmes qui extraient le nombre de véhicules à partir de vidéos de caméras de circulation. Cependant, les caméras de circulation ne sont pas toujours disponibles et, dans bien des cas, elles ne fournissent que des images statiques. C’est le cas de la plupart des programmes de caméras de circulation au Canada, qui fournissent des images statiques plutôt que des vidéos. Il est toutefois plus difficile d’estimer le débit de circulation à partir des comptes de véhicules tirés d’images statiques extraites à plusieurs minutes d’intervalle. Dans le présent document, nous proposons un système de vision par ordinateur qui télécharge à des intervalles fréquents des images statiques de circulation et en extrait le nombre de véhicules. Nous proposons également différentes méthodes pour estimer les débits de circulation à partir des comptes extraits des images statiques, méthodes que nous avons mises à l’essai au moyen des données tirées des images de circulation pour estimer les débits de circulation de plusieurs sections de route.
3 Méthodologie
3.1 Étude des programmes de caméras de circulation en place au Canada
Après avoir passé en revue les programmes de caméras de circulation en place dans les provinces et municipalités canadiennes, nous avons constaté que des caméras de circulation sont en place dans toutes les provinces canadiennes (nous en avons relevé 2 881 au total [tableau 1]), alors qu’il n’y en a aucune dans les territoires à ce jour.
| Province | Nombre de caméras | Fréquence de rafraîchissement approximative (en minutes) |
|---|---|---|
| Ontario | 1 064 | 3 à 10 minutes |
| Colombie-Britannique | 916 | 2 à 30 minutes |
| Québec | 470 | 1 à 3 minutes |
| Alberta | 270 | 15 à 30 minutes |
| Nouveau-Brunswick | 53 | 10 à 25 minutes |
| Nouvelle-Écosse | 52 | 15 à 30 minutes |
| Manitoba | 31 | 2 à 21 minutes |
| Saskatchewan | 21 | 1 à 15 minutes |
| Île-du-Prince-Édouard | 4 | Environ 15 minutes |
| Nombre total de caméras dans les provinces | 2 881 | - |
| Source : Données produites par les auteurs, selon les renseignements en ligne sur les programmes provinciaux de caméras de circulation. | ||
Le tableau 2 présente les données que nous avons recueillies pour 10 municipalités étudiées. Nous avons mis l’accent sur les municipalités qui ont leur propre programme de caméras de circulation, distinct d’un programme provincial. Dans l’ensemble des 35 municipalités en importance au chapitre de la taille de la population étudiées, nous avons relevé 1 518 caméras au total.
3.2 Interfaces de programmation d’application utilisées
Le prototype du système utilise des images tirées des API de trois programmes de caméras de circulation, gérés respectivement par les Villes de Calgary et de Toronto, et par la Province d’Ontario.
Nous avons choisi le programme de Calgary pour ses images cohérentes et de bonne qualité, la facilité d’accès à son API et son taux élevé de rafraîchissement des données d’une minute, et ceux de Toronto et de l’Ontario en raison de leur volume élevé d’images et de la facilité d’accès à leur API.
Le programme de Calgary compte 141 caméras de circulation dont les images, d’une résolution spatiale de 840 par 630 pixels, sont accessibles au public, et dont les données sont rafraîchies toutes les minutes. La Ville a également tenu compte de la protection de la vie privée dans son programme; elle déclare que « le système de caméras de circulation n’enregistre aucun renseignement personnel, comme le numéro d’immatriculation ou le visage de l’occupant d’un véhicule » [traduction] (City of Calgary, 2022).
Le programme de Toronto compte quant à lui 238 caméras de circulation, réparties un peu partout dans la ville, et dont les images ont une résolution spatiale de 400 par 225 pixels. Le site Web du programme de la Ville indique que la fréquence de rafraîchissement est de deux minutes, tandis qu’un autre document sur les caméras de circulation de Toronto énonce qu’elle est de trois minutes. Selon nos observations, les données étaient rafraîchies toutes les deux à trois minutes environ.
| Région métropolitaine de recensement | Nombre de caméras | Fréquence de rafraîchissement approximative |
|---|---|---|
| Toronto | 298 | 2 à 3 minutes |
| Montréal | 528 | 5 à 6 minutes |
| Vancouver | 159 | 10 minutes |
| Calgary | 141 | 1 minute |
| Edmonton | 54 | En temps réel |
| Ottawa | 291 | 1 à 10 minutes |
| Oshawa | 29 | 1 à 2 minutes |
| St. John’s | 6 | 1 à 10 minutes |
| Abbotsford–Mission | 7 | 5 à 10 minutes |
| Moncton | 5 | 1 seconde |
| Total pour l’ensemble des municipalités | 1 518 | - |
| Source : Données produites par les auteurs, selon les renseignements en ligne sur les programmes municipaux de caméras de circulation. | ||
Le ministère des Transports de l’Ontario possède au total 1 064 caméras de circulation. Ces caméras donnent accès à des images statiques et se trouvent près des autoroutes de la province. La fréquence de rafraîchissement de ces caméras varie d’un endroit à l’autre. D’après nos observations, elle semble varier de 3 à 10 minutes. La résolution spatiale des images variait également d’une caméra à l’autre.
3.3 You Only Look Once, version 3
Le présent projet se fonde sur le modèle de détection d’objets en temps réel YOLOv3 (Redmon & Farhadi, 2018). Dans ce modèle, un réseau neuronal est appliqué à une image entière, qui est divisée en régions. Pour chaque région, des probabilités sont calculées et des boîtes englobantes sont générées et pondérées en fonction des probabilités prédites (Redmon, 2018). Cela diffère des classificateurs et localisateurs précédents dont le modèle est appliqué à des images à plusieurs emplacements et échelles. Puisqu’il ne nécessite qu’une seule évaluation du réseau pour prédire les probabilités, YOLOv3 est plus rapide que les modèles R-CNN et Fast R-CNN (Redmon, 2018).
YOLOv3 prédit la probabilité qu’un objet se trouve dans une boîte englobante en utilisant des grappes de dimensions comme boîtes d’ancrage (Redmon & Farhadi, 2018). Il prédit également les classes que la boîte englobante peut contenir au moyen de la classification à étiquettes multiples. Ces prédictions sont effectuées à l’aide de la fonction de perte d’entropie croisée binaire pendant l’entraînement du modèle (Redmon & Farhadi, 2018).
YOLOv3 détecte les caractéristiques de certains objets dans l’image pour classer l’objet et l’encadrer d’une boîte englobante. Étant donné que la taille des objets dans l’image peut différer de leur taille réelle (par exemple, en fonction de la proximité de l’objet par rapport à la caméra), YOLOv3 tente de détecter les caractéristiques à trois échelles différentes (Redmon & Farhadi, 2018). L’extracteur des caractéristiques de base comporte plusieurs couches convolutives, dont la dernière prédit les dimensions de la boîte englobante du tenseur 3D, un score indiquant la probabilité que l’objet se trouve dans la région d’intérêt proposée, ainsi que la classe de l’objet. Le score est calculé à l’aide d’une régression logistique et a une valeur de 1 si la boîte englobante chevauche une plus grande superficie d’un objet réel sur le terrain (réalité de terrain) que les boîtes englobantes précédentes (Redmon & Farhadi, 2018). Les caractéristiques suréchantillonées sont enchaînées à des cartes de caractéristiques antérieures dans le réseau de sorte que des renseignements sémantiques significatifs puissent en être extraits (Redmon & Farhadi, 2018). La dernière couche de l’extracteur de caractéristiques répète le même modèle de sorte que les caractéristiques et les calculs précédents puissent être intégrés dans les prédictions (Redmon & Farhadi, 2018). Le réseau d’extraction de caractéristiques utilise des couches convolutives successives de 3 par 3 et de 1 par 1. Il s’appelle Darknet-53 en raison de ses 53 couches convolutives (Redmon & Farhadi, 2018).
Ce modèle de vision par ordinateur à source ouverte a été entraîné sur l’ensemble de données COCO (Redmon & Farhadi, 2018). Cet ensemble de données contient 91 classes d’objets qui peuvent être facilement reconnues par un humain, pour un total de 2,5 millions d’instances étiquetées dans 328 000 images (Redmon & Farhadi, 2018).
3.4 Flux de travail
Nous avons élaboré un flux de travail pour l’extraction et l’analyse des images des API de caméras de circulation de Calgary, de Toronto et de l’Ontario. Le flux de travail comprend quatre étapes, à savoir l’acquisition d’images à partir des API de caméras de circulation, l’exécution du modèle de détection d’objets dans les images, la génération d’un ensemble de données basé sur les objets détectés et l’analyse des résultats.
Les images ont été extraites des API de caméras de circulation de chaque programme, puis traitées au moyen d’un modèle de détection d’objet en temps réel. Le modèle YOLO traite chaque image pour y détecter les véhicules. L’image renvoyée contient une boîte englobante autour de l’objet détecté, une étiquette d’objet et un score de confiance à l’égard de la classe prédite. Bien que ce modèle permette de détecter de nombreuses classes d’objets, le présent projet met l’accent sur la détection de voitures, de camions, d’autobus, de motocyclettes, de piétons et de bicyclettes. Le nombre d’objets détectés pour chaque classe est compté et enregistré sous forme d’entrée horodatée pour chaque image. Une fois terminé pour chaque image disponible, ce processus est répété à une fréquence prédéterminée.
Ainsi, pour Calgary, les images ont été extraites de l’API du programme de caméras de circulation toutes les cinq minutes. Pour les caméras de Toronto et un sous-ensemble de caméras de l’Ontario, les images ont été extraites toutes les 10 minutes en raison du plus grand nombre d’emplacements et de la plus faible fréquence de rafraîchissement des images. Un ensemble de données sous forme de valeurs séparées par des virgules est ainsi obtenu. En plus du nombre de véhicules comptés, l’ensemble de données contient également les données de caméras de circulation tirées de l’API de chaque programme, telles que le nom de la rue, l’emplacement et les coordonnées des caméras.
3.5 Défis
L’un des défis liés à la collecte de données était que les flux de plusieurs caméras étaient parfois indisponibles. Lorsque les flux des caméras de l’Ontario étaient indisponibles, une image indiquant que la caméra n’est pas disponible s’affichait. En l’absence d’une méthode fiable permettant de prévoir ces moments d’indisponibilité, nous risquions de nous retrouver avec des comptes de zéro véhicule dans l’ensemble de données. Voir la figure 1 pour un exemple d’image d’une caméra de l’Ontario indiquant que la caméra n’est pas disponible.
Après avoir étudié le problème, nous avons déterminé que les caméras affichaient systématiquement une image indiquant qu’elles n’étaient pas disponibles une fois sur six. Nous avons ainsi pu recourir à la comparaison d’images pour détecter ces images. Pour ce faire, nous avons utilisé OpenCV pour intégrer à notre système une fonction de comparaison au niveau des pixels entre les images obtenues et les images de référence, puis ajouté un nouvel indicateur de « disponibilité de la caméra » à l’ensemble de données, ce qui a facilité l’analyse des données.
Figure 1. Image du ministère des Transports de l’Ontario indiquant qu’une caméra n’est pas disponible
Description de la figure 1
Un exemple d’image de ce qui est affiché par le ministère des Transports de l’Ontario lorsqu’une de ses images de caméra n’est pas disponible. On y voit la photo d’une autoroute à fort trafic avec un texte en jaune qui indique : « La caméra COMPASS n’est pas disponible actuellement. COMPASS/Ministère des Transports. COMPASS/ » en anglais et en français.
Source : Ministère des Transports (COMPASS/Ministry of Transportation, 2021).
Nous avons également dû résoudre d’autres cas d’images de caméra non disponibles. Par exemple, lors de la collecte d’images de circulation à Toronto, nous avons remarqué qu’un écran noir s’affichait parfois, plutôt qu’une image indiquant que la caméra n’est pas disponible. Pour résoudre ce problème, nous avons utilisé une technique de comparaison d’images similaire à celle utilisée dans le cas précédent. Dans d’autres cas, nous nous retrouvions avec des fichiers d’images corrompus. Nous avons réglé ce problème en ajoutant des valeurs « Not a Number » (pas un nombre) dans l’ensemble de données de sortie.
Nous mènerons une étude plus approfondie pour évaluer la précision de la détection des images dans différentes conditions environnementales (p. ex. variations dans les conditions météorologiques et l’éclairage). Nous étudierons également les méthodes d’imputation (p. ex. l’imputation fondée sur le krigeage) pour combler les lacunes statistiques dans les cas susmentionnés.
4 Estimation du débit de circulation
Comme nous l’avons expliqué dans la section précédente, le système que nous avons conçu génère des comptes des véhicules détectés dans les images de circulation. Le taux de rafraîchissement des images des programmes municipaux et provinciaux de caméras de circulation est généralement de l’ordre de quelques minutes. Par conséquent, les comptes de véhicules peuvent fournir des renseignements sur les tendances de la circulation, mais ne permettent pas d’obtenir des estimations réelles du débit de circulation. Nous proposons donc trois méthodes pour estimer le débit de circulation à partir des comptes tirés des images des caméras statiques. Notre démarche est fondée sur une évaluation des options méthodologiques disponibles, que nous décrivons brièvement ci-après. Les méthodes proposées visent à produire des estimations du débit de circulation à partir des comptes de véhicules, utilisés comme intrants (voir la figure 2). Les trois méthodes proposées se complètent et chacune peut l’emporter sur les deux autres selon les circonstances. Par exemple, la première méthode fonctionne mieux avec des données historiques, tandis que la troisième est optimale lorsqu’elle est utilisée avec les échantillons vidéo disponibles.
Figure 2. Estimation du débit de circulation

Description de la figure 2
Un organigramme illustrant le processus d’estimation du volume de la circulation à l’aide d’images de caméra. Le processus se déroule dans l’ordre suivant : les emplacements des caméras sont déterminés, les emplacements des caméras sont alimentés dans un système de téléchargement des images de la circulation, les images de la circulation sont alimentées dans le système de détection et de dénombrement des véhicules, le système de détection et de dénombrement des véhicules produit les dénombrements de véhicules, les dénombrements de véhicules sont alimentés dans le système d’estimation du volume, et le système d’estimation du volume produit des estimations du volume de la circulation.
4.1 Méthode fondée sur les données historiques
Des données historiques sur le débit de circulation, comme le débit journalier moyen annuel (DJMA), sont accessibles au public pour de nombreuses sections de route dans des provinces comme l’Ontario et l’Alberta. Les données sur le DJMA sont disponibles pour de nombreuses autoroutes en Ontario qui sont aussi surveillées par des caméras de circulation. La figure 3 présente une carte des emplacements où les caméras de circulation et les données sur le DJMA sont à la fois disponibles.
Figure 3. Une carte des emplacements où les caméras de circulation et les données sur le DJMA sont à la fois disponibles
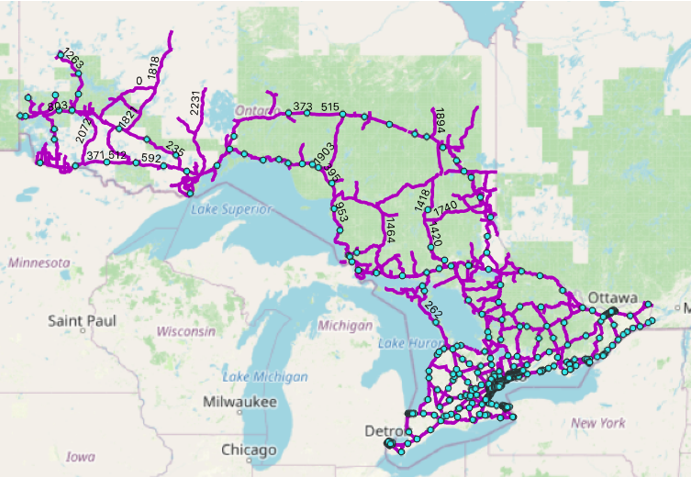
Description de la figure 3
Une carte représentant la province de l’Ontario avec une couche de lignes violettes et de points bleus sur la carte. Les lignes violettes représentent les segments de route pour lesquels on dispose de données disponibles sur le volume de circulation quotidienne moyenne annuelle, et les points bleus représentent les emplacements de caméras de circulation en Ontario.
Source : Visualisation des auteurs.
Il est possible de combiner le DJMA des années précédentes avec les comptes tirés des images de circulation pour estimer le débit de circulation pour certaines sections de route. On peut ainsi obtenir une bonne estimation de la circulation pour une période précise de l’année. L’inconvénient de cette méthode est que le DJMA peut varier grandement d’une année à l’autre, ce qui introduit un certain degré d’inexactitude dans les estimations produites. La méthode peut se résumer comme suit :
À partir du compte quotidien indiqué par les caméras pour une section de route, c.-à-d. Nd,c, on calcule le compte quotidien moyen, Nc, pour la période au cours de laquelle les comptes sont disponibles.
(1)
En multipliant le compte quotidien normalisé, , par le DJMA historique, NDJMA, on obtient le débit de circulation quotidien estimé, Nd,est, comme suit :
(2)
4.2 Méthode fondée sur un modèle
Dans cette méthode, un modèle est entraîné pour produire, à partir du compte quotidien moyen de véhicules par image au cours d’une période donnée, le débit de circulation pour cette période. Cette approche peut se résumer en trois étapes principales. Dans la première étape, des données sont recueillies (à partir de vidéos) sur le nombre moyen de véhicules par image et le débit de circulation correspondant pour la période d’échantillonnage au cours de laquelle les images ont été prises. Pour ce faire, des images sont extraites de chaque vidéo (p. ex. 12 images par période Ti [p. ex. une minute]). Ensuite, le nombre moyen de véhicules par image est dénombré pour chaque période d’échantillonnage Ti. Le débit de circulation réel sur le terrain est ensuite calculé pour chaque période d’échantillonnage Ti, c.-à-d. DTi. La deuxième étape consiste à créer un modèle (p. ex. linéaire ou polynomial) qui met en correspondance le nombre moyen de véhicules et le débit de circulation pour la période de la vidéo, T. La troisième étape est l’application du modèle pour estimer le débit de circulation pour n’importe quelle période. Une fois qu’un modèle est construit, il peut être utilisé pour estimer le débit de circulation pour une période P qui est un multiple M de T. Pour ce faire, les images de circulation pour la période P sont recueillies, puis le nombre moyen de véhicules par image, NP,moyen, est calculé. Par la suite, le nombre de véhicules par période T, DT, est estimé à l’aide du modèle. Enfin, le nombre de véhicules par période P, c.-à-d. le débit de circulation pour la période P, est estimé à l’aide de la formule suivante :
(3)
4.3 Formule proposée
Nous proposons une autre méthode qui élimine le besoin de données historiques. Cette méthode permet de calculer le débit de circulation DT pour n’importe quelle période T, selon la formule suivante :
(4)
où Nmoyen est le nombre moyen de véhicules par image de la circulation, et Tpass est le temps moyen pris par un véhicule pour traverser la région dans l’image. Nmoyen est calculé à partir d’images statiques recueillies pendant la période T. Pour ce faire, un modèle de détection d’objet peut être utilisé pour détecter le nombre de véhicules dans chaque image (Nmoyen). La valeur de Tpass est difficile à calculer parce qu’elle représente le temps pris par un véhicule pour traverser le champ de vision de la caméra de circulation, de sorte qu’une estimation précise de cette valeur nécessite une analyse d’un flux vidéo. Il est toutefois possible d’estimer cette valeur à partir d’une analyse des images de la caméra de circulation et d’une estimation ou d’une hypothèse de la vitesse moyenne des véhicules sur cette section de route. Par exemple, si Nmoyen = 6 et Tpass = 2,5s, le débit de circulation estimé par minute serait de véhicules par minute.
Les variables de la formule sont illustrées à la figure 4. Cette figure montre le champ de vision d’une caméra sur une route. Il y a deux voitures qui passent, et il faut aux voitures Tpass,1 et Tpass,2 secondes pour traverser le champ de vision de la caméra. Au moment t, le nombre de véhicules qui se trouveraient dans une image est Nt = 2.
Figure 4. Illustration de la formule de prédiction

Description de la figure 4
Une illustration d’une route pour montrer comment fonctionne la formule de prédiction. Un triangle orange représente une caméra de surveillance de la circulation, et les lignes partant de ce triangle indiquent le champ de vision. Un rectangle bleu et un rectangle rouge représentent deux voitures. Il faut à la voiture bleue Tpass,1 secondes et à la voiture rouge Tpass,2 secondes pour passer dans le champ de vision de la caméra. Au moment t, le nombre de voitures qui se trouveraient dans une image est Nt = 2.
Source : Image des auteurs.
5 Résultats
5.1 Échantillons d’images
La présente section contient des exemples de résultats du processus de détection de véhicules produits par le système. La figure 5 a) et la figure 5 b) montrent des images tirées d’une caméras de circulation de la ville de Calgary, avant et après la détection des véhicules par le système, respectivement. On peut y voir que les voitures et les camions qui circulent sur la partie visible de l’autoroute ont été détectés et classés correctement, y compris ceux situés au bas de l’image.
Figure 5. Autoroute à Calgary a) avant la détection des véhicules et b) après la détection
Les voitures détectées sont encadrées de boîtes englobantes bleues et les camions détectés sont encadrés de boîtes englobantes vertes.

Description de la figure 5
Deux images de caméras de surveillance de la circulation de Calgary sont montrées pour comparer (a) une image avant la détection du véhicule et (b) une image après la détection du véhicule. Dans l’image (a), on voit une autoroute avec de nombreuses voitures. Dans l’image (b), la même autoroute avec des voitures est représentée avec des rectangles colorés (boîtes de délimitation) et du texte autour des véhicules. Les rectangles bleus sont surmontés du texte « voiture », et les rectangles verts du texte « camion ».
Source : Ville de Calgary (Calgary, 2021).
Le modèle a également été testé sur des sections de route situées à proximité d’immeubles commerciaux à Calgary. La figure 6 a) et la figure 6 b) montrent des images tirées d’une caméras de circulation de la ville de Calgary, avant et après la détection des véhicules par le système, respectivement. On peut y voir que les trois piétons qui apparaissent dans l’image ont été détectés.
Figure 6. Exemple d’image de circulation contenant des piétons dans la ville de Calgary a) avant la détection des objets et b) après la détection des objets
Trois piétons sont encadrés de boîtes englobantes rouges, et les voitures sont encadrées de boîtes bleues.

Description de la figure 6
Deux images de caméras de surveillance de la circulation de Calgary sont montrées pour comparer (a) un piéton avant la détection et (b) un piéton après la détection. Dans l’image (a), une rue est représentée avec quelques voitures et deux piétons qui traversent la route. Dans l’image (b), le même emplacement est représenté avec des rectangles colorés (boîtes de délimitation) et du texte autour des piétons et des véhicules. Les rectangles bleus sont surmontés du texte « voiture », et les rectangles rouges, du texte « personne ».
Source : Ville de Calgary (Calgary, 2021).
5.2 Analyse des données sur la circulation
Le modèle de traitement des données génère des renseignements pertinents sur les tendances de la circulation. Les données de sortie ont été analysées en tant que série chronologique et les résultats ont été visualisés. Cette analyse a permis de dégager des tendances et des schémas de circulation clairs qui étaient corrélés à des modèles de circulation habituels, comme les heures de pointe, ainsi qu’à des événements uniques, comme les mesures de confinement et les restrictions.
La figure 7 montre l’incidence du confinement préventif lié à la COVID-19 en Alberta sur la circulation. Le 8 février 2022, à 23 h 59, le gouvernement de l’Alberta a entamé la première étape de la levée des restrictions de confinement (Government of Alberta, 2022) , en levant notamment les limites de capacité pour les sites pouvant accueillir moins de 500 personnes et en autorisant la consommation de nourriture et de boissons dans les grands lieux et événements (Government of Alberta, 2022) . La figure 7 montre l’incidence de cette levée des restrictions sur la circulation à un emplacement sélectionné à Calgary. Cet emplacement se trouve à une intersection du centre-ville qui est bordée de tours commerciales.
On peut voir qu’entre le premier vendredi du confinement, où le débit de circulation était faible, et le vendredi suivant, la semaine où l’Alberta a amorcé la première étape de déconfinement, le nombre de voitures est passé d’environ 250 à 3 000. Il s’agit d’un écart considérable. La semaine suivante, le vendredi 18 février, le nombre de voitures a encore augmenté pour atteindre environ 3 000 voitures. Dans l’ensemble, on observe une tendance à la reprise de la circulation après l’assouplissement des restrictions.
Figure 7. Comptes quotidiens estimatifs de voitures à un emplacement sélectionné (emplacement no 36), Calgary
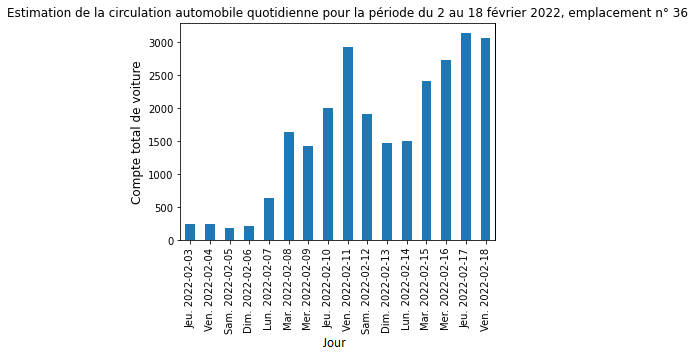
Description de la figure 7
| Jour | Compte total de voiture |
|---|---|
| Jeu. 2022-02-03 | 1 762,55 |
| Ven. 2022-02-04 | 2 250,25 |
| Sam. 2022-02-05 | 2 532,99 |
| Dim. 2022-02-06 | 1 811,43 |
| Lun. 2022-02-07 | 2 413,50 |
| Mar. 2022-02-08 | 2 566,75 |
| Mer. 2022-02-09 | 2 349,49 |
| Jeu. 2022-02-10 | 2 875,24 |
| Ven. 2022-02-11 | 2 252,01 |
| Sam. 2022-02-12 | 2 424,94 |
| Dim. 2022-02-13 | 1 631,43 |
| Lun. 2022-02-14 | 2 597,00 |
| Mar. 2022-02-15 | 1 891,69 |
| Mer. 2022-02-16 | 1 621,65 |
| Jeu. 2022-02-17 | 1 862,36 |
| Ven. 2022-02-18 | 2 004,65 |
| Sam. 2022-02-19 | 2 472,00 |
| Source : Calculs des auteurs. | |
La figure 8 a) présente les comptes totaux de voitures pendant un jour de semaine à Calgary. Les comptes de voitures augmentent vers 8 h, 13 h et 17 h, ce qui correspond aux heures de pointe habituelles associées au navettage. La figure 8 b) présente les tendances calculées à partir de tous les emplacements de caméra à Calgary pendant un jour de fin de semaine. Dans cette figure, on peut voir que les comptes de véhicules par heure augmentent de façon beaucoup plus graduelle comparativement aux comptes estimés pendant un jour de semaine, lesquels atteignaient des sommets aux heures de pointe. Par opposition, la figure 8 b) montre une augmentation constante de la circulation entre 6 h et 14 h.
Figure 8. a) Estimations des comptes de voitures à un emplacement sélectionné (emplacement no 13) à Calgary, par heure de la journée, le mercredi 22 septembre 2021, et b) Estimation de la circulation automobile détectée par l’ensemble des caméras de circulation à Calgary, par heure de la journée, le samedi 25 septembre 2021

Description de la figure 8
a)
| Heure | Compte total de voitures |
|---|---|
| 0 | 3,00 |
| 1 | 6,00 |
| 2 | 0,00 |
| 3 | 0,00 |
| 4 | 2,00 |
| 5 | 3,00 |
| 6 | 4,00 |
| 7 | 30,00 |
| 8 | 72,00 |
| 9 | 38,00 |
| 10 | 35,00 |
| 11 | 51,00 |
| 12 | 54,00 |
| 13 | 64,36 |
| 14 | 37,00 |
| 15 | 40,00 |
| 16 | 77,00 |
| 17 | 69,33 |
| 18 | 60,00 |
| 19 | 49,00 |
| 20 | 26,00 |
| 21 | 6,00 |
| 22 | 9,00 |
| 23 | 1,00 |
| Source : Calculs des auteurs. | |
b)
| Heures | Compte total de voitures |
|---|---|
| 0 | 174 |
| 1 | 1 277 |
| 2 | 1 011 |
| 3 | 888 |
| 4 | 878 |
| 5 | 1 165 |
| 6 | 2 012 |
| 7 | 4 647 |
| 8 | 833 |
| 9 | 11 286 |
| 10 | 13 379 |
| 11 | 15 251 |
| 12 | 16 272 |
| 13 | 16 759 |
| 14 | 16 923 |
| 15 | 16 794 |
| 16 | 15 583 |
| 17 | 9 659 |
| 18 | 8 786 |
| 19 | 9 929 |
| 20 | 4 683 |
| 21 | 3 679 |
| 22 | 2 899 |
| 23 | 2 309 |
| Source : Calculs des auteurs. | |
Les données peuvent également être agrégées de différentes façons pour obtenir une multitude de renseignements. Par exemple, un examen des comptes de voitures de Calgary agrégés par jour de la semaine pour la période du 22 au 28 septembre 2021 a permis de constater que les comptes les plus élevés ont été enregistrés le mercredi, tandis que les comptes les plus bas ont été enregistrés le dimanche.
Nous avons également analysé des sections d’autoroute à Toronto et en Ontario. La figure 9 a) présente les comptes totaux de voitures à l’intersection de la rue Dufferin et de la rue Bloor, à Toronto, par heure de la journée, pendant un jour de semaine. Cet emplacement est bordé d’un arrêt de métro et de nombreux petits commerces. Comme prévu, la circulation est la plus dense pendant les heures normales de travail (de 8 h à 16 h 59), et culmine vers 13 h, ce qui correspond à l’heure de dîner normale. La figure 9 b) illustre la circulation automobile à l’intersection des rues Bloor et Bay, à Toronto, par heure de la journée, pendant un jour de fin de semaine. Cet emplacement est bordé d’institutions financières et de magasins. La circulation automobile augmente le matin pour ensuite demeurer stable, sauf entre 17 h et 18 h, où elle diminue. La circulation diminue aussi plus tard et plus graduellement, comparativement à l’exemple précédent.
Figure 9. a) Circulation automobile à l’intersection des rues Dufferin et Bloor, à Toronto (emplacement no 8049), par heure de la journée, le mercredi 8 décembre 2021, et b) Circulation automobile à l’intersection des rues Bay et Bloor, à Toronto (emplacement no 8043), par heure de la journée, le samedi 11 décembre 2021

Description de la figure 9
a)
| Heure | Compte total de voitures |
|---|---|
| 0 | 4 |
| 1 | 3 |
| 2 | 5 |
| 3 | 1 |
| 4 | 6 |
| 5 | 2 |
| 6 | 5 |
| 7 | 16 |
| 8 | 39 |
| 9 | 34 |
| 10 | 36 |
| 11 | 33 |
| 12 | 34 |
| 13 | 44 |
| 14 | 43 |
| 15 | 41 |
| 16 | 32 |
| 17 | 7 |
| 18 | 13 |
| 19 | 16 |
| 20 | 13 |
| 21 | 13 |
| 22 | 14 |
| 23 | 10 |
| Source : Calculs des auteurs. | |
b)
| Heure | Compte total de voitures |
|---|---|
| 0 | 5 |
| 1 | 7 |
| 2 | 1 |
| 3 | 5 |
| 4 | 3 |
| 5 | 3 |
| 6 | 3 |
| 7 | 14 |
| 8 | 19 |
| 9 | 26 |
| 10 | 16 |
| 11 | 20 |
| 12 | 24 |
| 13 | 23 |
| 14 | 14 |
| 15 | 19 |
| 16 | 25 |
| 17 | 5 |
| 18 | 18 |
| 19 | 13 |
| 20 | 12 |
| 21 | 7 |
| 22 | 6 |
| 23 | 6 |
| Source : Calculs des auteurs. | |
Des données sur la circulation ont également été recueillies pour des autoroutes provinciales de l’Ontario (voir la figure 10). Ces données ont permis de constater une tendance cyclique et une diminution graduelle de la circulation en décembre. Cette diminution graduelle s’explique probablement par la baisse du nombre de personnes qui se déplacent pour le travail pendant le congé des Fêtes. En ce qui concerne la tendance cyclique, les comptes de véhicules diminuent la fin de semaine, probablement parce que moins de gens empruntent l’autoroute pour aller travailler.
Figure 10. Estimations de la circulation automobile quotidienne sur une autoroute de l’Ontario (emplacement no 23-3) selon les images d’une caméra de la circulation, décembre 2021

Description de la figure 10
| Date | Compte total de voitures |
|---|---|
| Wed 2021-12-01 | 845 |
| Thu 2021-12-02 | 726 |
| Fri 2021-12-03 | 871 |
| Sat 2021-12-04 | 699 |
| Sun 2021-12-05 | 584 |
| Mon 2021-12-06 | 653 |
| Tue 2021-12-07 | 749 |
| Wed 2021-12-08 | 652 |
| Thu 2021-12-09 | 733 |
| Fri 2021-12-10 | 787 |
| Sat 2021-12-11 | 499 |
| Sun 2021-12-12 | 368 |
| Mon 2021-12-13 | 484 |
| Tue 2021-12-14 | 508 |
| Wed 2021-12-15 | 776 |
| Thu 2021-12-16 | 862 |
| Fri 2021-12-17 | 613 |
| Sat 2021-12-18 | 505 |
| Sun 2021-12-19 | 363 |
| Mon 2021-12-20 | 685 |
| Tue 2021-12-21 | 624 |
| Wed 2021-12-22 | 747 |
| Thu 2021-12-23 | 689 |
| Fri 2021-12-24 | 446 |
| Sat 2021-12-25 | 403 |
| Sun 2021-12-26 | 545 |
| Mon 2021-12-27 | 370 |
| Tue 2021-12-28 | 525 |
| Wed 2021-12-29 | 595 |
| Thu 2021-12-30 | 600 |
| Fri 2021-12-31 | 461 |
| Source : Calculs des auteurs. | |
5.3 Estimation du débit de circulation
Dans la présente section, nous abordons les résultats obtenus à partir des méthodes proposées pour estimer le débit de circulation. La figure 11 fournit les estimations du débit de circulation quotidien fondées sur le DJMA pour une autoroute en Ontario (autoroute Queen Elizabeth, entre le chemin Bronte et la troisième ligne) pour le mois de décembre 2021. La figure montre que le débit de circulation quotidien le plus élevé était de 320 662 véhicules, le 23 décembre 2021. Cela peut s’expliquer par l’augmentation habituelle de la circulation liée aux événements des Fêtes et aux déplacements en direction et en provenance de grands centres commerciaux avant Noël. Les valeurs de circulation quotidiennes les plus faibles sont celles du 25 décembre 2021 (le jour de Noël) et du 27 décembre 2021, c’est-à-dire le lendemain du Lendemain de Noël. Comme le jour de Noël était un samedi, le 27 décembre était un jour férié en Ontario, ce qui explique le faible débit de circulation observé ces deux journées. L’augmentation du débit de circulation le 26 décembre est attribuable au Lendemain de Noël, jour férié où les gens sortent pour magasiner ou pour des événements sociaux.
Figure 11. Estimations du débit de circulation quotidien sur une section d’autoroute de l’Ontario

Description de la figure 11
| Date | Débit de circulation quotidien estim |
|---|---|
| 2021-12-01 | 283 031 |
| 2021-12-02 | 154 230 |
| 2021-12-03 | 253 733 |
| 2021-12-04 | 224 159 |
| 2021-12-05 | 170 261 |
| 2021-12-06 | 242 954 |
| 2021-12-07 | 301 827 |
| 2021-12-08 | 225 817 |
| 2021-12-09 | 263 960 |
| 2021-12-10 | 268 106 |
| 2021-12-11 | 171 367 |
| 2021-12-12 | 128 801 |
| 2021-12-13 | 166 115 |
| 2021-12-14 | 151 466 |
| 2021-12-15 | 253 180 |
| 2021-12-16 | 288 283 |
| 2021-12-17 | 216 972 |
| 2021-12-18 | 141 239 |
| 2021-12-19 | 116 364 |
| 2021-12-20 | 229 687 |
| 2021-12-21 | 260 090 |
| 2021-12-22 | 281 649 |
| 2021-12-23 | 320 622 |
| 2021-12-24 | 255 668 |
| 2021-12-25 | 89 000 |
| 2021-12-26 | 177 171 |
| 2021-12-27 | 88 447 |
| 2021-12-28 | 137 093 |
| 2021-12-29 | 222 777 |
| 2021-12-30 | 225 817 |
| 2021-12-31 | 200 112 |
| Source : Calculs des auteurs. | |
La figure 12 présente les résultats obtenus à partir de la méthode fondée sur le DJMA et de celle fondée sur un modèle. Bien que les estimations obtenues au moyen des deux méthodes suivent la même tendance, celles obtenues à l’aide de la méthode fondée sur un modèle sont considérablement plus faibles que celles obtenues à l’aide de la méthode fondée sur le DJMA. Ces résultats peuvent être attribuables aux raisons suivantes :
- La valeur du DJMA utilisée est celle de 2016, avant la pandémie. Toutefois, la circulation a diminué depuis 2020 en raison des mesures de confinement et du télétravail.
- Le modèle a été construit à l’aide de vidéos de circulation sur des routes ayant des caractéristiques différentes, c.-à-d. deux directions avec deux voies chacune, tandis que les images d’essai provenaient d’une route comptant trois voies dans chaque direction.
- Le modèle a été conçu à partir de comptes de véhicules réels sur le terrain, tandis que les estimations sont fondées sur les comptes de véhicules détectés, qui sont habituellement plus faibles.
Malheureusement, nous n’avions pas de section de route pour laquelle nous disposions à la fois de données historiques et de données vidéo récentes, que nous aurions pu utiliser pour recueillir les débits de circulation réels sur le terrain afin de valider les modèles proposés. Nous sommes actuellement à la recherche de telles données pour valider les méthodes proposées.
Figure 12. Comparaison entre les estimations du débit de circulation quotidien fondées sur le modèle et celles fondées sur le débit journalier moyen annuel

Description de la figure 12
| Date | Débit de circulation quotidien estimé - Méthode fondée sur le modèle | Débit de circulation quotidien estimé - Méthode fondée sur le DJMA |
|---|---|---|
| 2021-12-01 | 93 811,82 | 283 031,46 |
| 2021-12-02 | 53 415,68 | 154 230,03 |
| 2021-12-03 | 86 332,32 | 253 733,28 |
| 2021-12-04 | 77 791,43 | 224 158,71 |
| 2021-12-05 | 59 540,78 | 170 261,11 |
| 2021-12-06 | 83 336,58 | 242 953,76 |
| 2021-12-07 | 98 112,93 | 301 826,52 |
| 2021-12-08 | 78 297,36 | 225 817,09 |
| 2021-12-09 | 89 052,16 | 263 960,01 |
| 2021-12-10 | 90 121,26 | 268 105,97 |
| 2021-12-11 | 59 951,18 | 171 366,70 |
| 2021-12-12 | 43 020,00 | 128 801,43 |
| 2021-12-13 | 57 988,03 | 166 115,14 |
| 2021-12-14 | 52 326,42 | 151 466,06 |
| 2021-12-15 | 86 181,92 | 253 180,49 |
| 2021-12-16 | 95 052,11 | 288 283,02 |
| 2021-12-17 | 75 561,43 | 216 972,36 |
| 2021-12-18 | 48 210,22 | 141 239,33 |
| 2021-12-19 | 37 625,09 | 116 363,52 |
| 2021-12-20 | 79 465,25 | 229 686,66 |
| 2021-12-21 | 88 036,93 | 260 090,43 |
| 2021-12-22 | 93 480,42 | 281 649,47 |
| 2021-12-23 | 102 037,21 | 320 621,58 |
| 2021-12-24 | 86 855,96 | 255 668,07 |
| 2021-12-25 | 25 021,78 | 89 000,13 |
| 2021-12-26 | 62 080,55 | 177 171,06 |
| 2021-12-27 | 24 756,60 | 88 447,33 |
| 2021-12-28 | 46 502,71 | 137 093,36 |
| 2021-12-29 | 77 367,34 | 222 776,72 |
| 2021-12-30 | 78 297,36 | 225 817,09 |
| 2021-12-31 | 70 086,81 | 200 112,09 |
| Source : Calculs des auteurs. | ||
La figure 13 indique le rapport entre les estimations fondées sur le modèle et les estimations fondées sur le DJMA. Le rapport se situe entre 0,28 et 0,35, ce qui signifie qu’il est constant.
Figure 13. Rapport entre les estimations fondées sur le débit journalier moyen annuel et les estimations fondées sur le modèle

Description de la figure 13
| Date | Rapport entre les estimations fondées sur le modèle et les estimations fondées sur le DJMA |
|---|---|
| 2021-12-01 | 0,3315 |
| 2021-12-02 | 0,3463 |
| 2021-12-03 | 0,3402 |
| 2021-12-04 | 0,3470 |
| 2021-12-05 | 0,3497 |
| 2021-12-06 | 0,3430 |
| 2021-12-07 | 0,3251 |
| 2021-12-08 | 0,3467 |
| 2021-12-09 | 0,3374 |
| 2021-12-10 | 0,3361 |
| 2021-12-11 | 0,3498 |
| 2021-12-12 | 0,3340 |
| 2021-12-13 | 0,3491 |
| 2021-12-14 | 0,3455 |
| 2021-12-15 | 0,3404 |
| 2021-12-16 | 0,3297 |
| 2021-12-17 | 0,3483 |
| 2021-12-18 | 0,3413 |
| 2021-12-19 | 0,3233 |
| 2021-12-20 | 0,3460 |
| 2021-12-21 | 0,3385 |
| 2021-12-22 | 0,3319 |
| 2021-12-23 | 0,3182 |
| 2021-12-24 | 0,3397 |
| 2021-12-25 | 0,2811 |
| 2021-12-26 | 0,3504 |
| 2021-12-27 | 0,2799 |
| 2021-12-28 | 0,3392 |
| 2021-12-29 | 0,3473 |
| 2021-12-30 | 0,3467 |
| 2021-12-31 | 0,3502 |
| Source : Calculs des auteurs. | |
Dans l’application qui suit, nous présentons les résultats obtenus au moyen de la formule proposée. Nous avons utilisé une vidéo de circulation pour dénombrer manuellement les comptes de voitures dans la vidéo afin de trouver le débit de circulation réel sur le terrain pendant différentes périodes d’échantillonnage (d’une minute chacune) de la vidéo. Nous avons également déterminé les paramètres Nmoyen et Tpass pour ces périodes. Rappelons que la formule proposée pour estimer le débit de circulation sur une période donnée, T, est la formule (4). Pour utiliser cette formule, nous devons estimer les valeurs des variables Nmoyen et Tpass. Nmoyen est le nombre moyen de véhicules détectés dans une image. Pour estimer la valeur de Nmoyen pour une période d’échantillonnage donnée, des images ont été extraites à différents moments (p. ex. toutes les 10 secondes) de la vidéo pour chaque période, et les véhicules ont été dénombrés dans chaque image. Le nombre de véhicules dans une image extraite de la vidéo au moment t est appelé Nt. Tpass,i désigne le temps pris par un véhicule, i, pour traverser le champ de vision de la caméra. Cette valeur est calculée pour différents véhicules. Pour chaque période d’échantillonnage, la valeur de Tpass,i a été recueillie pour différents véhicules. Ensuite, pour chaque période (d’une minute), la moyenne des différentes valeurs de Nt a été calculée pour trouver la valeur de Nmoyen, et la valeur moyenne de Tpass,i a été calculée pour trouver la valeur de Tpass.
En plus de ces calculs, un modèle de vision par ordinateur a été utilisé pour détecter les véhicules dans une région d’intérêt dans la vidéo et enregistrer l’heure à laquelle ils y entrent et en sortent. Ces données ont également été utilisées pour estimer les valeurs des variables Nmoyen et Tpass. En résumé, les données suivantes ont été recueillies pour plusieurs périodes d’une minute :
- le débit de circulation réel pour chaque période d’échantillonnage;
- les valeurs des variables Nmoyen et Tpass fondées sur la collecte manuelle de données pour chaque période (utilisées pour estimer le débit de circulation pour cette période);
- les valeurs des variables Nmoyen et Tpass recueillies au moyen d’un modèle de détection de véhicules pour chaque période (utilisées pour estimer le débit de circulation pour cette période).
Les résultats de cet essai sont présentés à la figure 14, laquelle contient trois courbes qui illustrent le débit de circulation estimé pour chaque période. Chaque courbe correspond à l’une des méthodes ci-dessus. La proximité des résultats obtenus à partir des trois méthodes indique que la formule proposée peut être utilisée pour fournir des estimations précises du débit de circulation. La seule information manquante pour ce système est Tpass, qui est difficile à obtenir à partir d’images statiques. Toutefois, la valeur de cette variable peut être estimée au moyen d’une analyse visuelle des images de la section de route.
Figure 14. Comparaison des résultats de trois méthodes d’estimation du volume

Description de la figure 14
| Temps (min) | Formule proposée avec dénombrement manuel | Dénombrement manuel | Formule proposée avec modèle de vision par ordinateur |
|---|---|---|---|
| Débit (comptes de véhicules sur 5 minutes) | |||
| 1 | 417 | 459 | 394 |
| 2 | 374 | 415 | 336 |
| 3 | 313 | 362 | 330 |
| 4 | 398 | 425 | 375 |
| 5 | 290 | 334 | 276 |
| 6 | 429 | 436 | 352 |
| Source : Calculs des auteurs. | |||
6 Conclusion et travaux futurs
Dans le présent document, nous avons proposé un système de vision par ordinateur conçu pour extraire de façon périodique des comptes de véhicules des images des caméras de circulation au Canada. Premièrement, nous avons mené une étude pour compiler des données sur les programmes de caméras de circulation existants au Canada. Ensuite, un système a été mis au point pour recueillir des images des API de trois programmes de caméras de circulation (gérés respectivement par les Villes de Calgary et de Toronto, et la Province d’Ontario). Le système détecte différents types de véhicules dans ces images à l’aide du modèle de détection d’objets à source ouverte YOLOv3 qui a été entraîné sur l’ensemble de données COCO. Des comptes des types de véhicules détectés (voiture, autobus, motocyclette, etc.) ont ainsi pu être générés. Nous avons ensuite exporté les résultats obtenus sous forme de série chronologique et analysé les données de sortie. La visualisation et l’analyse des ensembles de données recueillis ont révélé qu’il est possible d’en tirer des tendances et des schémas clairs de la circulation. Nous avons également proposé différentes méthodes pour estimer les débits de circulation à partir des comptes extraits des images statiques. Nous avons mis à l’essai ces méthodes au moyen des comptes recueillis pour estimer les débits de circulation de plusieurs sections de route.
Nous avons constaté que les API de certains programmes de caméras de circulation sont meilleures que d’autres au chapitre de la qualité et de la disponibilité des images. Par exemple, les caméras de Calgary offrent des images plus fiables et sont moins souvent en panne que celles de Toronto. Dans les cas où le système doit recueillir un flux de données continu, un hôte fiable (p. ex. un serveur local ou un environnement en nuage) sera requis. Le système est actuellement déployé dans l’environnement infonuagique de Statistique Canada, l’Espace de travail d’analyse avancée, où une instance distincte est exécutée pour chaque API sur un serveur Notebook distinct.
Répétons que l’estimation du débit de circulation dans les grandes régions urbaines est une fonction importante, particulièrement compte tenu de l’augmentation de la congestion et des répercussions sur les politiques, du temps perdu aux émissions de carbone. Les comptes de véhicules constituent un élément clé de l’estimation du débit de circulation, et le présent article propose une nouvelle approche de dénombrement fondée sur les caméras de circulation. Les résultats du flux de travail du traitement des images illustrent des tendances claires de la circulation tout au long de la journée et de la semaine, et les données peuvent être associées à des événements uniques, comme les périodes de confinement et de restrictions et les jours fériés. Ces ensembles de données ont de multiples emplois, allant de la production de données de base sur la circulation à la production d’un ensemble complet d’indices des activités économiques locales. Cette information peut également être utilisée en complément des sources de données existantes sur la mobilité dans les programmes de tourisme et de transport.
De plus, le modèle peut être adapté pour servir à plusieurs autres usages. Par exemple, des travaux exploratoires sont en cours pour entraîner un modèle de sorte qu’il puisse classer les camions commerciaux (p. ex. camions-remorques, fourgons, camions-citernes, camions réfrigérés), en particulier ceux qui circulent sur des sections de route situées aux frontières provinciales, en vue d’en dégager des indications des activités économiques. D’autres travaux tireront parti des ensembles de données extraits dans des zones municipales pour créer des indicateurs de mobilité, lesquels pourront être utilisés dans les indices des conditions d’affaires locales. De plus, une analyse des ensembles de données pour certains quartiers touristiques sera menée pour mesurer l’activité dans ces régions. Enfin, d’autres améliorations seront apportées au flux de travail afin d’automatiser l’ensemble du processus, de la collecte des données à l’analyse et à la visualisation, de sorte à produire des données sur la circulation en temps réel sur une base quotidienne ou hebdomadaire.
Références
Calgary, T. C. (2021). Calgary Traffic Cameras. Récupéré sur Calgary.ca: https://trafficcam.calgary.ca
Chen, L., Grimstead, I., Bell, D., Karanka, J., Dimond, L., James, P., . . . & Edwardes, A. (2021). Estimating Vehicle and Pedestrian Activity from Town and City Traffic Cameras. Basel.
City of Calgary. (2022, March). Calgary Traffic Cameras. Récupéré sur Calgary.ca: https://www.calgary.ca/transportation/roads/traffic/advisories-closures-and-detours/calgary-traffic-cameras.html
COMPASS/Ministry of Transportation. (2021). Récupéré sur 511 Ontario: https://511on.ca
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler, M., Benenson, R., . . . Schiele, B. (2019). Cityscapes dataset. Récupéré sur https://www.cityscapes-dataset.com/
Doulamis, N., Doulamis, A., & Protopapadakis, E. (2018). Deep Learning for Computer Vision: A Brief Review. Computational Intelligence and Neuroscience.
Ecola, L., & Wachs, M. (2012). Exploring the Relationship between Travel Demand and Economic Growth. The RAND Corporation. Récupéré sur https://www.fhwa.dot.gov/policy/otps/pubs/vmt_gdp/index.cfm
Fedorov, A., Nikolskaia, K., Ivanov, S., Shepelev, V., & Minbaleev, A. (2019). Traffic flow estimation with data from a video surveillance camera. Journal of big data.
Government of Alberta. (2022, February 8). Alberta takes steps to safely return to normal | L’Alberta prend des mesures pour un retour à la normale sécuritaire. Récupéré sur Alberta.ca: https://www.alberta.ca/release.cfm?xID=8185996876395-A336-5B57-A82D6FEE916E1060
Li, S., Chang, F., Liu, C., & Li, N. (2020). Vehicle counting and traffic flow parameter estimation for dense traffic scenes. IET Intelligent Transport Systems.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ramanan, D., . . . Zitnick, C. L. (2014). Microsoft COCO: Common Objects in Context. European Conference on Computer Vision, (pp. 740-755).
Liu, J., Weinert, A., & Amin, S. (2018). Semantic topic analysis of traffic camera images. IEEE.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu, C.-Y., & Berg, A. C. (2016). SSD: Single Shot MultiBox Detector. European Conference on Computer Vision, (pp. 21-37).
Redmon, J. (2018). YOLO: Real-Time Object Detection. Récupéré sur https://pjreddie.com/darknet/yolo/
Redmon, J., & Farhadi, A. (2018). YOLOv3: An Incremental Improvement. arXiv: 1804.02767.
Ren, S., He, K., Girshick, R., & Sun, J. (2016). Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks.
Schrank, D., Eisele, B., & Lomax, T. (2019). 2019 Urban Mobility Report. The Texas A&M Transportation Institute.
Sekułaa, P., Markovića, N., Laana, Z. V., & Sadabadia, K. F. (2018). Estimating historical hourly traffic volumes via machine learning and vehicle probe data: A Maryland case study. Transportation Research Part C: Emerging Technologies, 97, 147-158.
Snowdon, J., Gkountouna, O., Zü e, A., & Pfoser, D. (2018 ). Spatiotemporal Tra ic Volume Estimation Model Based on GPS Samples. Proceedings of the Fifth International ACM SIGMOD Workshop on Managing and Mining Enriched Geo-Spatial, (pp. 1-6).
Song, H., Liang, H., Li, H., Dai, Z., & Yun, X. (2019). Vision-based vehicle detection and counting system using deep learning in highway scenes. European Transport Research Review.
Yadav, P., Sarkar, D., Salwala, D., & Curry, E. (2020). Traffic prediction framework for OpenStreetMap using deep learning based complex event processing and open traffic cameras. arXiv preprint arXiv:2008.00928.
Yang, H., Yang, J., Han, L., Liu, X., Pu, L., Chin, S.-M., & Hwang, H.-L. (2018). A Kriging based spatiotemporal approach for traffic volume data imputation. Public Library of Science.
Zhao, X., Carling, K., & Håkansson, J. (2014). Reliability of GPS based traffic data: an experimental evaluation.
- Date de modification :